《哨兵1SAR空间数据包协议数据单元》文档对数据包的结构进行了详细描述,并提供了用户数据的格式和解码算法。
原文链接: 哨兵1SAR空间数据包协议数据单元文档英文版
同系列中的其他文章篇链接:
哨兵1SAR空间数据包协议数据单元文档(一)
哨兵1SAR空间数据包协议数据单元文档(二)
哨兵1SAR空间数据包协议数据单元文档(三)
哨兵1SAR空间数据包协议数据单元文档(四)
今天介绍的内容如下:
哨兵1SAR空间数据包协议数据单元文档(五)
- 3.2.5 雷达配置支持服务 (Radar Configuration Support Service)
- 3.2.5.11 采样窗口开始时间(Sampling Window Start Time)
- 3.2.5.12 采样窗口长度(Sampling Window Length)
- 3.2.5.13 SAS SSB数据字段
- 3.2.5.13.1 SAS SSB数据字段 - 成像/噪声
- 3.2.5.13.1.1 极化(Polarisation)
- 3.2.5.13.1.2 温度补偿(Temperature Compensation)
- 3.2.5.13.1.3 仰角波束地址(Elevation Beam Address)
- 3.2.5.13.1.4 方位角波束地址(Azimuth Beam Address)
- 3.2.5.13.2 SAS SSB数据字段 - 校准
- 3.2.5.13.2.1 极化(Polarisation)
- 3.2.5.13.2.2 温度补偿(Temperature Compensation)
- 3.2.5.13.2.3 SAS测试模式(SAS Test Mode)
- 3.2.5.13.2.4 校准类型(Cal Type)
- 3.2.5.13.2.5 校准波束地址(Calibration Beam Address)
3.2.5 雷达配置支持服务 (Radar Configuration Support Service)
3.2.5.11 采样窗口开始时间(Sampling Window Start Time)
描述:采样窗口开始时间定义了在PRI(脉冲重复间隔)内非校准信号的采样窗口的开始时刻。
性能:在数据获取过程中,这是一个变量值(在不同的条带间有不同的值,并且在每个条带内部也有不同的值)。
短名称:SWST(Sampling Window Start Time)
代码名称:SWSTcode
代码属性:
• 开始位置:第53个八位字节的第0位
• 结束位置:第55个八位字节的第7位
• 码的大小:24位无符号整数
• 数据类型:无符号整数
• 适用的范围:0到2的24次方−1
解释:
SWST以时间为单位,其计算公式如下图所示:

采样窗口开始时间SWST和采样窗口长度SWL的重要性在以下草图中展示:
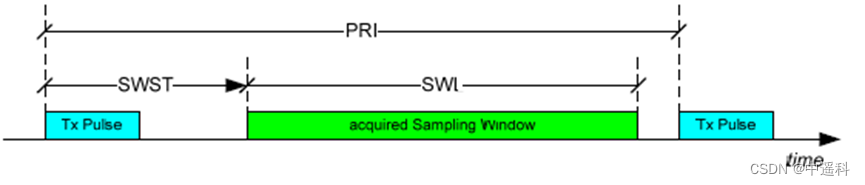
采样窗口的一部分,即被命令采集的采样窗口,将被处理并捕获在数据包中。如下图所示:
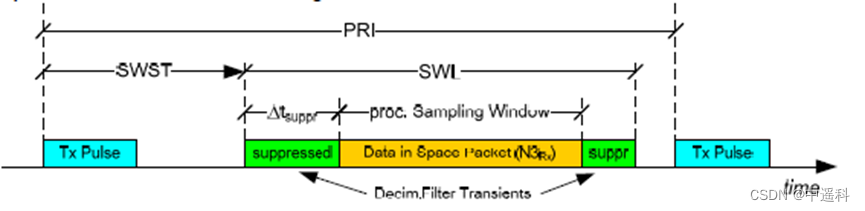
数字滤波器抑制了采集采样窗口中的FIR(有限脉冲响应)滤波器瞬态。数据包中捕获的数据对应于在采集采样窗口开始后采样的tsuppr数据。如下图所示:

SWST对于校准信号(SIGTYPcode > 7)不适用。校准信号的采集时序在附录5.3节(见后续章节)中展示。
依赖性:无
3.2.5.12 采样窗口长度(Sampling Window Length)
描述:采样窗口长度定义了在PRI(脉冲重复间隔)内非校准信号的采集采样窗口的持续时间。
性能:在数据获取过程中,这是一个变量值(在不同的条带间有不同的值,并且在每个条带内部也有不同的值)。
短名称:SWL(Sampling Window Length)
代码名称:SWLcode
代码属性:
• 开始位置:第56个八位字节的第0位
• 结束位置:第58个八位字节的第7位
• 码的大小:24位无符号整数
• 数据类型:无符号整数
• 适用的范围:0到2^24−1
解释:
SWL以时间为单位,其计算公式为:

相应地,SWL可以根据数字处理仪器接收机(RxM)不同阶段的采样频率以样本为单位表示:
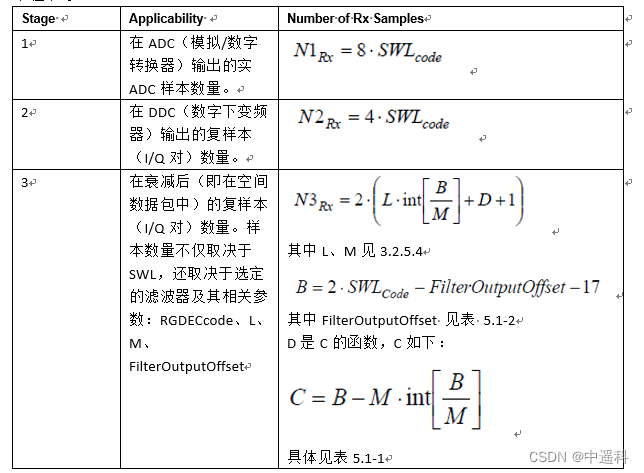
SWL适用于所有信号类型(SIGTYPcode)。
校准信号的采集时序在附录5.3节中展示。
依赖性:无。
3.2.5.13 SAS SSB数据字段
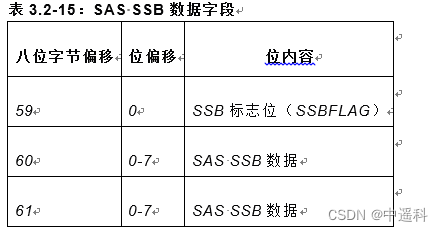
SAS SSB数据字段指示了SAS(合成孔径雷达天线子系统)的实际配置。SAS SSB数据字段的内容将根据仪器执行的是成像/噪声操作还是校准操作有两种可能的解释。这由SAS SSB数据字段中的一个标志位的值指示(见表3.2-15)。
描述:SAS SSB消息中的标志位指示了消息的类型以及向SAS下达的成像/噪声或校准操作的命令。
性能:数据获取过程中的变量值
短名称:SSBFLAG
代码名称:SSBFLAGcode
代码属性:
• 开始位置:第59个字节的第0位
• 结束位置:第59个字节的第0位
• 码的大小:1位
• 数据类型:布尔值(0或1)
解释:
• SSBFLAGcode 0:表示成像/噪声操作
• SSBFLAGcode 1:表示校准操作
依赖性:无
3.2.5.13.1 SAS SSB数据字段 - 成像/噪声
如果标志位“SSBFLAG”设置为“0”,则SAS SSB数据字段的内容应按照表3.2-16解释为成像/噪声操作。
表3.2-16:SAS SSB数据(成像/噪声)
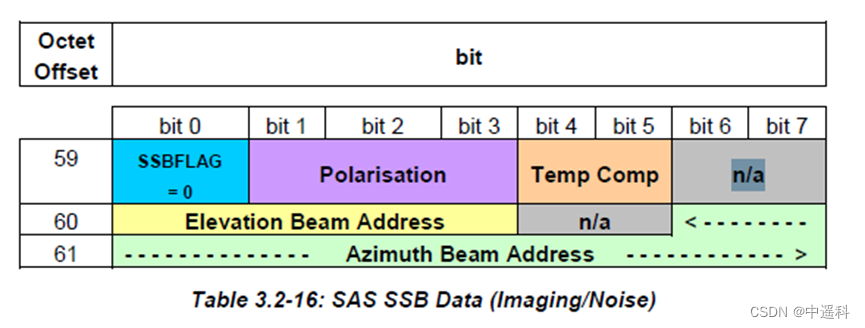
表格翻译:
SSB标志位(SSBFLAG)= 0
极化(Polarisation)
温度补偿(Temp Comp)
仰角波束地址(Elevation Beam Address)
方位角波束地址(Azimuth Beam Address)
3.2.5.13.1.1 极化(Polarisation)
描述:极化定义了极化配置。
性能:在数据获取过程中,该值为恒定值。
短名称:POL
代码名称:POLcode
代码属性:
• 开始位置:第59个字节的第1位
• 结束位置:第59个字节的第3位
• 码的大小:3位
• 数据类型:枚举
• 适用的范围:0 … 7
解释:
• POLcode的不同值对应不同的极化配置,具体如下:
o 0:H - 仅Tx(发射)水平极化
o 1:H H - RxH(接收水平极化)是共极化的
o 2:H V - RxV(接收垂直极化)是交叉极化的
o 3:H V+H - RxH是共极化的,RxV是交叉极化的
o 4:V - 仅Tx垂直极化
o 5:V H - RxH是交叉极化的
o 6:V V - RxV是共极化的
o 7:V V+H - RxH是交叉极化的,RxV是共极化的
注释:在双极化情况下(POLcode =3 或 POLcode =7),参数RXCHID(3.2.2.5)指示实际数据包的接收极化。
依赖性:根据POLcode的值,RXCHID有不同的适用情况,例如:
• POLcode为0时,RXCHID不适用
• POLcode为1或5时,RXCHID为1
• POLcode为2或3或7时,RXCHID可以是0或1
• POLcode为4时,RXCHID不适用
• POLcode为6时,RXCHID为0
3.2.5.13.1.2 温度补偿(Temperature Compensation)
描述:温度补偿指示了在SAS(SAR天线子系统)中温度补偿活动的状态。
性能:在数据获取过程中,该值为变量值。
短名称:TCMP
代码名称:TCMPcode
代码属性:
• 开始位置:第59个字节的第4位
• 结束位置:第59个字节的第5位
• 码的大小:2位
• 数据类型:枚举
• 适用的范围:0 … 3
解释:
• TCMPcode的不同值对应不同温度补偿状态,具体如下:
o 0:天线前端(Antenna FE)关闭,天线塔(Antenna TA)关闭
o 1:天线前端开启,天线塔关闭
o 2:天线前端关闭,天线塔开启
o 3:天线前端开启,天线塔开启
依赖性:无
3.2.5.13.1.3 仰角波束地址(Elevation Beam Address)
描述:仰角波束地址指向在当前PRI(脉冲重复间隔)中选定的仰角波束激励系数。
性能:对于除Stripmap模式之外的其他模式,在数据获取过程中这是一个变量值。
短名称:EBADR
代码名称:EBADRcode
代码属性:
• 开始位置:第60个字节的第0位
• 结束位置:第60个字节的第3位
• 码的大小:4位
• 数据类型:无符号整数
• 适用的范围:0 … 15
解释:EBADR = EBADRcode识别在当前PRI中应用于SAR成像的实际模式条带的16个可用仰角波束之一。
• 依赖性:无
3.2.5.13.1.4 方位角波束地址(Azimuth Beam Address)
描述:方位角波束地址指向在当前PRI(脉冲重复间隔)中选定的方位角波束激励系数。
性能:对于除Stripmap和Wave模式之外的其他模式,在数据获取过程中这是一个变量值。
短名称:ABADR
代码名称:ABADRcode
代码属性:
• 开始位置:第60个字节的第6位
• 结束位置:第61个字节的第7位
• 码的大小:10位
• 数据类型:无符号整数
• 适用的范围:0 … 1023
解释:ABADR = ABADRcode识别在当前PRI中应用于SAR成像的实际模式条带的1024个可用方位角波束之一。
依赖性:无
3.2.5.13.2 SAS SSB数据字段 - 校准
如果SSB标志位(SSBFLAG)设置为“1”,则SAS SSB数据字段的内容应按照表3.2-17解释为校准操作。
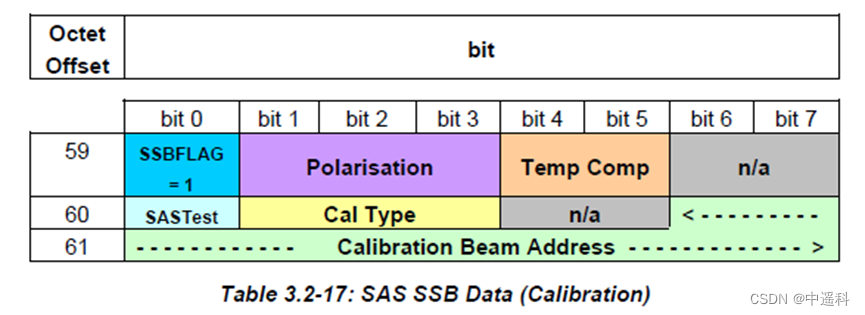
表格内容注释:
SSB标志位(SSBFLAG)= 1
校准类型(Cal Type)
温度补偿(Temp Comp)
SAS测试模式(SAS Test Mode)
校准波束地址(Calibration Beam Address)
3.2.5.13.2.1 极化(Polarisation)
参见3.2.5.13.1.1节。
3.2.5.13.2.2 温度补偿(Temperature Compensation)
参见3.2.5.13.1.2节。
3.2.5.13.2.3 SAS测试模式(SAS Test Mode)
描述:SAS测试模式参数是专门用于地面测试的模式,它允许使用特定的禁用TRMs(传输接收模块)模式来操作天线前端。SAS测试模式仅适用于校准操作。
应用:SAS测试模式的应用并不计划用于正常的在轨操作
(即,正常的SASTMcode = 1)。
性能:在校准操作期间,该值为恒定值。
短名称:SASTM
代码名称:SASTMcode
代码属性:
• 开始位置:第60个字节的第0位
• 结束位置:第60个字节的第0位
• 码的大小:1位
• 数据类型:布尔值(0或1)
解释:
• SASTMcode的值为1时,表示SAS测试模式激活。
• SASTMcode的值为0时,表示校准模式为正常。
依赖性:
• SASTMcode、SSBFLAGcode、CALMODcode和SIGTYPcode之间的关系如下:
o 如果SASTMcode为0,且SSBFLAGcode为1,则SAS测试模式激活。
o 如果SASTMcode为1,且所有其他适用的条件都满足,则表示正常的校准模式。
3.2.5.13.2.4 校准类型(Cal Type)
描述:校准类型定义了当前PRI(脉冲重复间隔)中应用的内部校准操作的类型。存在几种内部校准操作,它们通过校准信号在射频网络中不同的路由来区分。
性能:在校准操作期间,该值为变量值。
短名称:CALTYP
代码名称:CALTYPcode
代码属性:
• 开始位置:第60个字节的第1位
• 结束位置:第60个字节的第3位
• 码的大小:3位
• 数据类型:枚举
• 适用的范围:0 … 7
解释:
• CALTYPcode的不同值对应不同的校准类型描述,具体如下:
o 0:Tx Cal(发射机校准)
o 1:Rx Cal(接收机校准)
o 2:EPDN Cal(电子相位延迟校准)
o 3:TA Cal(塔校准)
o 4:APDN Cal(模拟相位延迟校准)
o 5和6:不适用
o 7:TxH Cal Iso(发射机极化H隔离校准)
注释:
• CALTYP是参数SIGTYP(见3.2.5.14.3)的一部分,并且与SIGTYP大于7的值相同。
• 校准数据(CALTYPcode大于7)仅与BAQMODcode = 0一起使用。
依赖性:无
3.2.5.13.2.5 校准波束地址(Calibration Beam Address)
描述:校准波束地址指向在当前PRI(脉冲重复间隔)中选定的用于校准操作的波束激励系数。
性能:在校准操作期间,该值为变量值。
短名称:CBADR
代码名称:CBADRcode
代码属性:
• 开始位置:第60个字节的第6位
• 结束位置:第61个字节的第7位
• 码的大小:10位
• 数据类型:无符号整数
• 适用的范围:0 … 1023
解释:CBADR = CBADRcode识别在当前PRI中应用于标准校准或作为通过PCC编码的校准波束序列进行射频特性化的一部分的1024个可用校准波束之一。
依赖性:无